
Trigger
When printing for a long time on Adventurer3, printing may fail midway only when you can not see the status of Adventurer 3 when you go out.
If it is the last and last one, it will give up as if it is not good enough, but if it is the beginning, it will continue to put out the filament meaninglessly after the failure. In this case something is disappointing.
Therefore, we examined the state of the Advertiser 3 through the firewall, and examined if there could be a function that could stop the output if necessary.
Current state
Even now, there seems to be some ways.
- Control via the cloud.
After all, Adventurer 3 seems to have a function to connect to the cloud, but as far as the Japanese sales agency’s site is seen, it seems that it is still preparing. - Control over the router.
If you use Global IP or DDNS and know your own WAN IP, you may be able to connect to the inside Adventurer3 by port mapping. However, if you do not use the IP fixation farm of Adventurer3 before doing port mapping, port mapping on the router side may be troublesome. - Can’t use OctoPrint?
It seems that there are plugins such as OctoPrint-Telegram and Polar Cloud.
By the way, Polar Cloud seems to be able to connect with Adventurer3 alone.
Overview of the function that you intend to create
In order to control Adventurer3 I will put Raspberry Pi in the local area, and access to an external server outside the router via that, and I think that it will go like feeling of controlling with a smartphone.
Adventurer3 <-> Raspberry Pi <-> external server <-> smartphone
The following is the feeling when expressed in the figure.
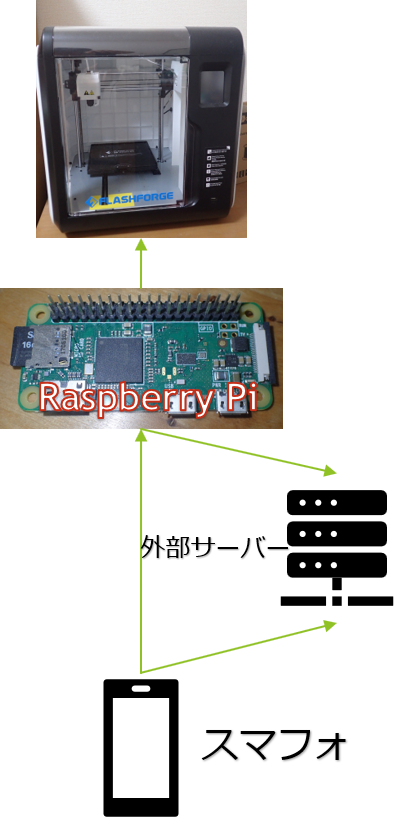
In addition to external servers, smartphones will also be used to teach Raspberry Pi for Adventurer3 control the IP of Adventurer 3 and the URL of the external server.
How to proceed
I have written programs in C # so far, but now I’m going to write programs in Python to use an external server and Raspberry Pi.
At first, I will proceed as follows.
- In order to be able to develop Python, port the Adventurer3 control class created in C # and create a console application.
- With Raspberry Pi only, it has a function to display an image that shows the control and print status of the Adventurer3.
- Launch an external server so that you can control the Adventurer3 with a smartphone from outside the router.
コメント